
| ||
Sat 2026-04-18
Fri 2026-04-17
Thu 2026-04-16
Wed 2026-04-15
Tue 2026-04-14
Mon 2026-04-13
Fri 2026-04-10
Wed 2026-04-08
Tue 2026-04-07
The Future of Everything is Lies, I Guess Mon 2026-04-06
Search
Archives
2024
12 11 10 09 08 07 06 05 04 03 02 01
2023
2022
2021
2020
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
2009
2008
2007
2006
2005
2004
2003
One good site
MDN
Nelson Minar
Blog licensed under a Creative Commons License
|
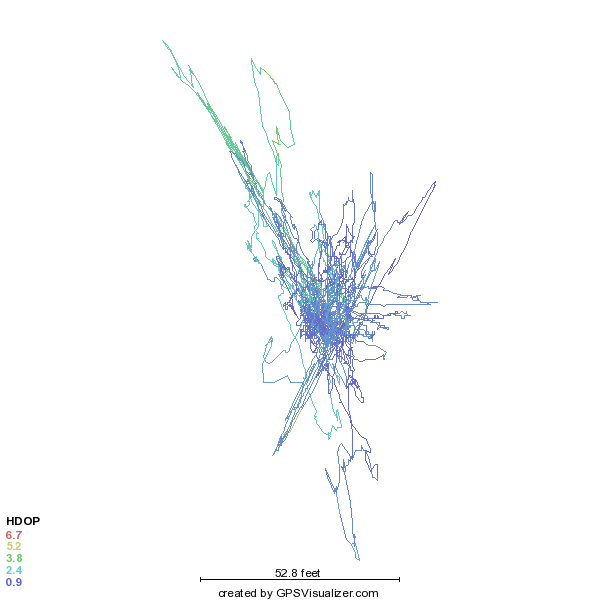
My last blog post talked about how GPS altitude works in theory. Now then, how does it work in practice?
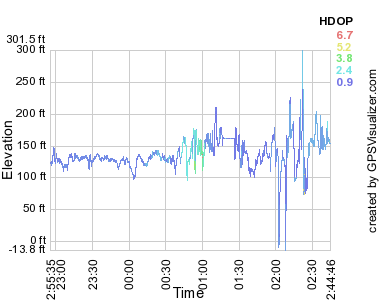 For my recreational purposes that large error is acceptable, and in flight the tracks are better than the above would suggest. For instrument navigation pilots use something like the GNS 430W, which for $8000 is accurate to within 6 feet and is certified to let you fly approaches as low as 250 feet above an airport you can't see in the fog. You can get even more accurate with a radar altimeter: $10,000 gets you your altitude over the actual ground below you to within 3 feet. Ironically, pilots seldom use anything other than pressure altitude for actual navigation altitude. A barometer in a steam gauge may not be terribly accurate, but it's not bad when calibrated and close to the ground. Also it's important all planes up in the air have the same kind of error, so we all use the old tech. Most GPS users don't care about GPS altitude either. Most people are on the ground, jogging or biking or driving, and there you're much better off using a database to know your current height. GPS altitude is useful for me in my flight tracking, just to see if I flew where I was supposed to. Even there it's annoying because sometimes the error puts me below the runway and Google Earth doesn't render that very well. One last caveat about GPS altitude and GPS in general. If you really care about your position you also care about RAIM. Sometimes GPS satellites fail or are in an inconvenient place. It's mostly predictable, you can look at a RAIM prediction map that shows a pessimistic view of GPS service. A high end GPS receiver with RAIM will constantly do crosschecks on the measured position and alert you when the position data is not high quality. (Parenthetically, I love my inaccurate AMOD data logger. It's very easy to use and at $65 is just fine for my recreational purposes. It's based on the well-regarded SiRFstar III chipset and even does WAAS to correct for ionospheric errors. Part of why my experimental error was so large may have been because I have static navigation turned on: when stationary, it may be better to turn it off.) |
|

{kind=link}